| รุ่น•ประเภท
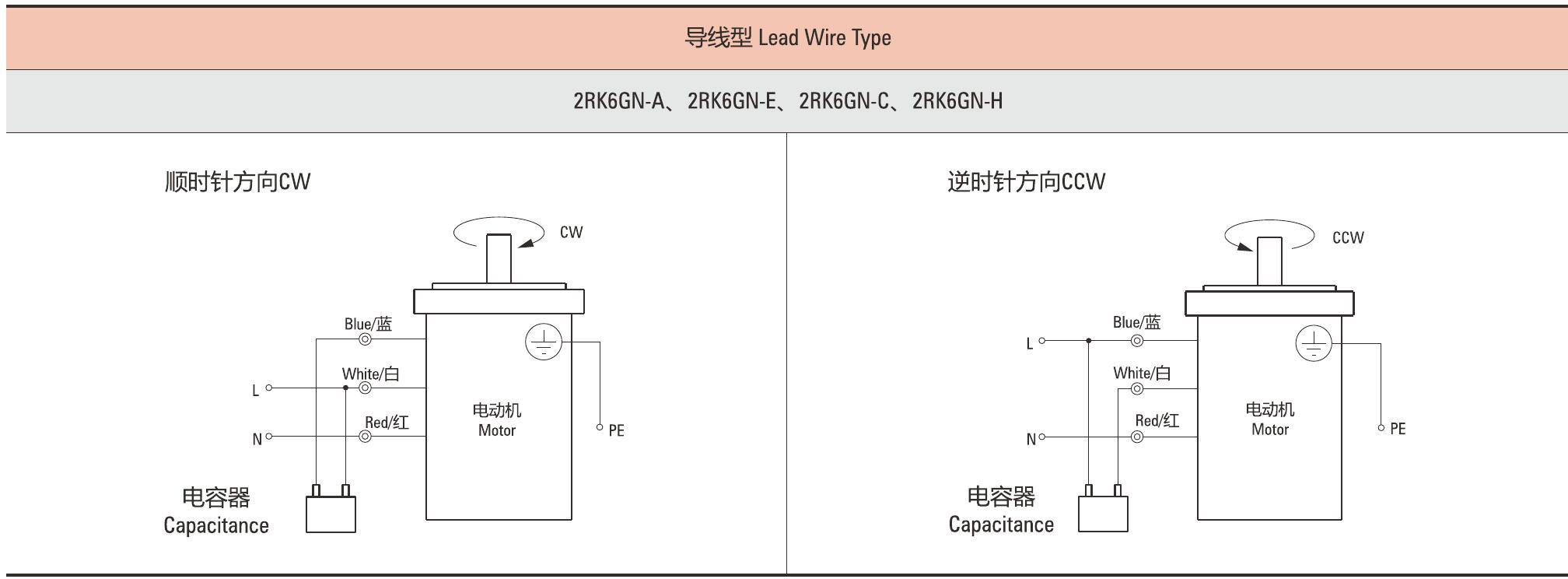
ประเภทลวดตะกั่ว | เอาท์พุท
อำนาจ
ว | แรงดันไฟฟ้า
วี | ความถี่
เฮิร์ตซ์ | ปัจจุบัน
ก | เริ่มต้น
แรงบิด
ม | จัดอันดับ
แรงบิด
ม | จัดอันดับ
ความเร็ว
รอบ / นาที | คาปาซิเตอร์
μF |
| เพลาปีกนก | เพลากลม |
| 2RK6GN-A | 2RK6A-A | 6 | 1 ชม 100 | 50 | 0.265 | 60 | 48 | 1200 | 4.0 |
| 60 | 0.232 | 55 | 40 | 1450 |
| 2RK6GN-E | 2RK6A-E | 6 | 1 ชม 110 | 50 | 0.185 | 45 | 40 | 1450 | 2.5 |
| 1 ชม 120 | 60 | 0.200 |
| 2RK6GN-C | 2RK6A-C | 6 | 1 ชม 220 | 50 | 0.145 | 55 | 48 | 1200 | 1.0 |
| 1 ชม 230 | 60 | 0.150 |
| 2RK6GN-H | 2RK6A-H | 6 | 1 ชม 220 | 50 | 0.145 | 40 | 60 | 1450 | 1.0 |
| 1 ชม 230 | 60 | 0.150 |
●ค่าที่แสดงสำหรับแรงบิดพิกัดและแรงบิดเริ่มต้นจะถูกวัดสำหรับการทำงานโดยไม่ต้องติดตั้งเบรกฝืด
●เมื่อมอเตอร์ได้รับการรับรองภายใต้มาตรฐานความปลอดภัยต่างๆชื่อรุ่นบนแผ่นป้ายจะเป็นชื่อรุ่นที่ได้รับอนุมัติ
●มีตัวป้องกันความร้อนในตัว (ส่งคืนอัตโนมัติ) หากมอเตอร์ร้อนเกินไปไม่ว่าด้วยเหตุผลใดก็ตามตัวป้องกันความร้อนจะเปิดขึ้นและมอเตอร์จะหยุดทำงาน
●เมื่ออุณหภูมิของมอเตอร์ลดลงตัวป้องกันความร้อนจะปิดลงและมอเตอร์จะสตาร์ทใหม่ ตรวจสอบให้แน่ใจว่าได้ปิดมอเตอร์ก่อนทำการตรวจสอบ
●หมายเหตุ: "- A" หมายถึงแรงดันไฟฟ้า 110v ตัวเก็บประจุประกอบ vaule เป็นไปตามฉลาก
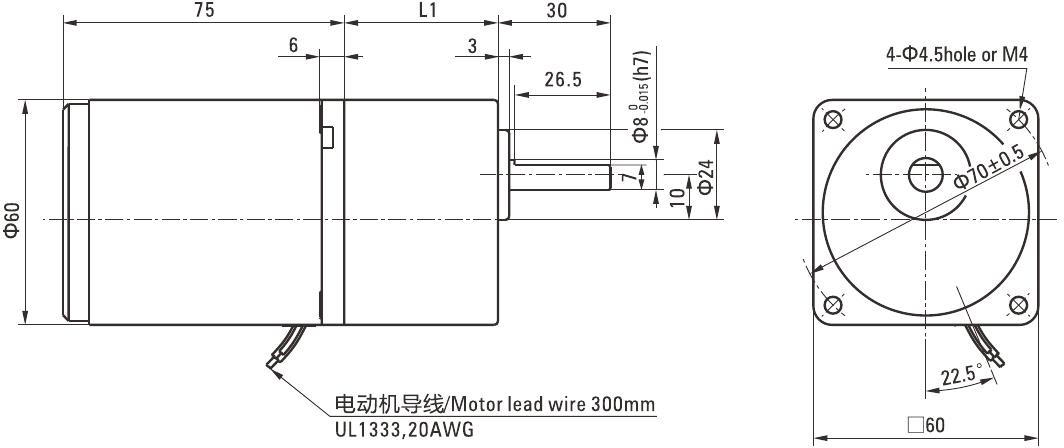
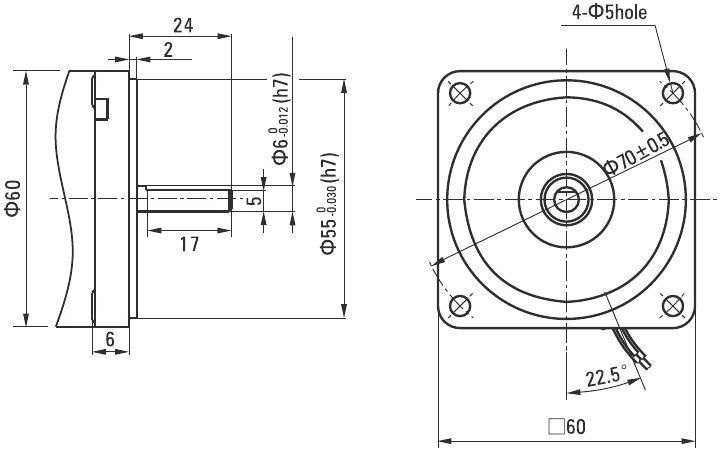
●มอเตอร์
| ประเภท | รุ่น |
| เพลาปีกนก | เพลากลม |
| ตะกั่ว
ลวด
ประเภท | 2RK6GN-A | 2RK6A-A |
| 2RK6GN-E | 2RK6A-E |
| 2RK6GN-C | 2RK6A-C |
| 2RK6GN-H | 2RK6A-H |
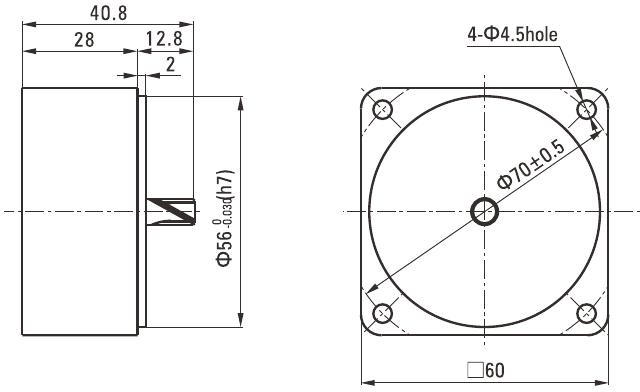
●หัวเกียร์เพลาคู่ขนาน (แยกจำหน่าย)
| ประเภทหัวเกียร์ | รุ่นหัวเกียร์ | อัตราทดเกียร์ |
| อายุการใช้งานยาวนาน•ต่ำ
เสียงรบกวน | 2GN □ K | 3,3.6,5、 6,7.5,9、 12.5,15,18,25,30、 36、 50、 60、 75,90,100、 120、 150、 180、 200 |
| 2GN10XK (หัวเกียร์แบบทศนิยม) |
•ป้อนอัตราทดเกียร์ในช่อง (□) ภายในชื่อรุ่น
•หัวเกียร์และกระปุกกลางสามารถแยกจำหน่ายได้
•ป้อนอัตราทดเกียร์ในช่อง (口) ภายในชื่อรุ่น
•ความเร็วคำนวณโดยหารความเร็วซิงโครนัสของมอเตอร์ (50 เฮิร์ต: 1500r / นาที, 60 เฮิร์ต: 1800 / นาที) ตามอัตราทดความเร็วจริงน้อยกว่าค่าที่แสดง 2% ~ 20%, ขึ้นอยู่กับขนาดของ โหลด
•ในการลดความเร็วเกินอัตราทดในตาราง, ติดหัวเกียร์ทศนิยม (อัตราทดเกียร์: 10) ระหว่างหัวเกียร์และมอเตอร์ในกรณีนั้น, แรงบิดที่อนุญาตคือ 3 นิวตันเมตร
| ประเภท
มอเตอร์ / หัวเกียร์ | อัตราทดเกียร์ | 3 | 3.6 | 5 | 6 | 7.5 | 9 | 12.5 | 15 | 18 | 25 | 30 | 36 | 50 | 60 | 75 | 90 | 100 | 120 | 150 | 180 | 200 |
| ความเร็วรอบ / นาที | 50 เฮิร์ต | 500 | 417 | 300 | 250 | 200 | 166 | 120 | 100 | 83 | 60 | 50 | 41 | 30 | 25 | 20 | 16 | 15 | 12.5 | 10 | 8.3 | 7.5 |
| 60 เฮิร์ต | 600 | 500 | 360 | 300 | 240 | 200 | 144 | 120 | 100 | 72 | 60 | 50 | 36 | 30 | 24 | 20 | 18 | 15 | 12 | 10 | 9 |
| 2RK6GN-A
2RK6GN-E
2RK6GN-C
2RK6GN-H | 2GN 口 K | 50Hz | 0.12 | 0.14 | 0.19 | 0.23 | 0.29 | 0.35 | 0.49 | 0.58 | 0.70 | 0.88 | 1.1 | 1.3 | 1.6 | 1.9 | 2.4 | 2.9 | 3 | 3 | 3 | 3 | 3 |
| 1.22 | 1.43 | 1.94 | 2.35 | 2.96 | 3.57 | 5.0 | 5.92 | 7.14 | 8.98 | 11.2 | 13.3 | 16.3 | 19.4 | 24.5 | 29.6 | 30 | 30 | 30 | 30 | 30 |
| 60Hz | 0.10 | 0.12 | 0.16 | 0.19 | 0.24 | 0.29 | 0.41 | 0.49 | 0.58 | 0.73 | 0.88 | 1.1 | 1.3 | 1.6 | 2.0 | 2.4 | 2.6 | 3 | 3 | 3 | 3 |
| 1.02 | 1.22 | 1.63 | 1.94 | 2.45 | 2.96 | 4.18 | 5.0 | 5.92 | 7.45 | 8.98 | 11.2 | 13.3 | 16.3 | 20.4 | 24.5 | 2.65 | 30 | 30 | 30 | 30 |
 ไทย
ไทย