 ไทย
ไทย



คุณสมบัติของมอเตอร์
■คุณสมบัติมอเตอร์เหนี่ยวนำ
1 โดยทั่วไปมอเตอร์เหนี่ยวนำขนาดเล็กหมายถึงมอเตอร์ที่หมุนโดยการเหนี่ยวนำ มอเตอร์เหนี่ยวนำอาศัยตัวเก็บประจุและแม่เหล็กไฟฟ้าเมื่อสตาร์ทและหมุน แม้ว่าแรงบิดเริ่มต้นจะไม่สูงมาก แต่ก็มีโครงสร้างที่เรียบง่ายมีประสิทธิภาพสูงและสามารถหมุนต่อไปได้
2、 มอเตอร์เฟสเดียวมีทิศทางย้อนกลับพร้อมกับการหมุนเมื่อใช้งาน Pis เปลี่ยนทิศทางของการหมุนมอเตอร์เฟสเดียวหลังจากหยุดมอเตอร์แล้วเท่านั้น
3、 มอเตอร์สามเฟสอาศัยแหล่งจ่ายสามเฟส มีประสิทธิภาพสูงและสามารถรับแรงบิดเริ่มต้นได้สูง
■คุณสมบัติของมอเตอร์แบบย้อนกลับได้
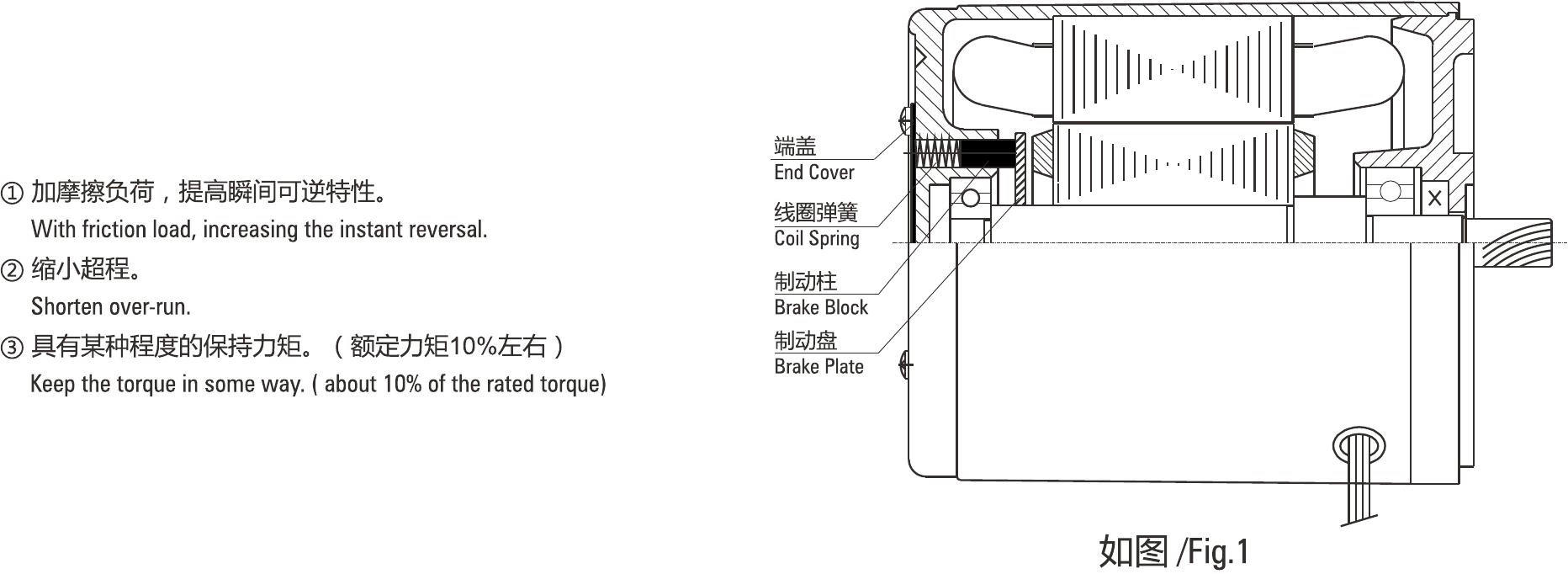
1、 Reversible Motor มีเบรกแรงเสียดทานที่ด้านหลังของตัวมอเตอร์ซึ่งออกแบบมาสำหรับการใช้งานที่ต้องมีการพลิกกลับของทิศทางบ่อยครั้ง สำหรับเบรกฝืดโปรดตรวจสอบ Draw 1 ชื้นกับสปริงส่งผลกระทบต่อดิสก์เบรกที่หมุนและวัสดุสิ้นเปลืองด้วยการกดอย่างต่อเนื่อง หน้าที่ของเบรกฝืดมีดังต่อไปนี้:
2、 แรงบิดในการรักษาหรือมากกว่าของเบรกแรงเสียดทานและการวิ่งมากเกินไปแสดงอยู่ในตารางที่ 1 เป็นเพียงข้อมูลอ้างอิงเท่านั้น เนื่องจากจะเปลี่ยนไปตามระยะเวลาการหมุนเช่นเดียวกับอุณหภูมิ โปรดทราบว่าแรงบิดอาจต่ำกว่าที่ระบุไว้ในตารางเล็กน้อยเมื่อดำเนินการครั้งแรก
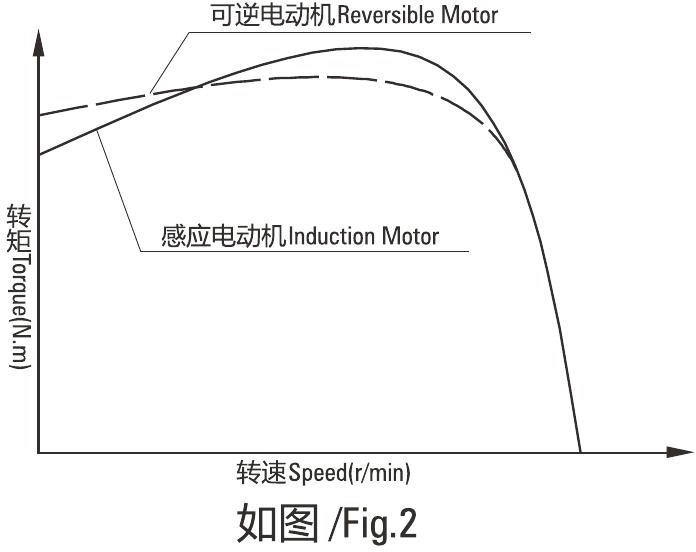
3、 มอเตอร์แบบพลิกกลับได้เช่นมอเตอร์เหนี่ยวนำเริ่มต้นโดยตัวเก็บประจุและมีลักษณะแรงบิดเดียวกันกับมอเตอร์เหนี่ยวนำ แต่มอเตอร์แบบพลิกกลับได้รับการออกแบบให้มีแรงบิดเริ่มต้นที่สูงขึ้นเพื่อเพิ่มคุณสมบัติการกลับตัวทันที กรุณาตรวจสอบรูปวาด 2.
■ตารางที่ 1. รักษาแรงบิดและวิ่งมากเกินไป
| เฟส | ขนาด | เอาท์พุท | มอเตอร์รุ่น | รักษาแรงบิด | ทำงานมากเกินไป | |
| mm | W | เอ็น. ซม | Kgf.cm | รอบ | ||
| สิงห์ - เฟส | 60 | 6 | 2RK6 | 0.5 | 0.05 | 4 |
| 70 | 15 | 3RK15 | 1.3 | 0.13 | 5 | |
| 80 | 25 | 4RK25 | 1.5 | 0.14 | 5 | |
| 90 | 40 | 5RK40 | 4.0 | 0.40 | 6 | |
| 60 | 5RK60 | |||||
| 90 | 5RK90 | |||||
| 120 | 5RK120 | |||||
■คุณสมบัติของมอเตอร์เบรกแม่เหล็กไฟฟ้าชนิดปิดการเปิดใช้งาน
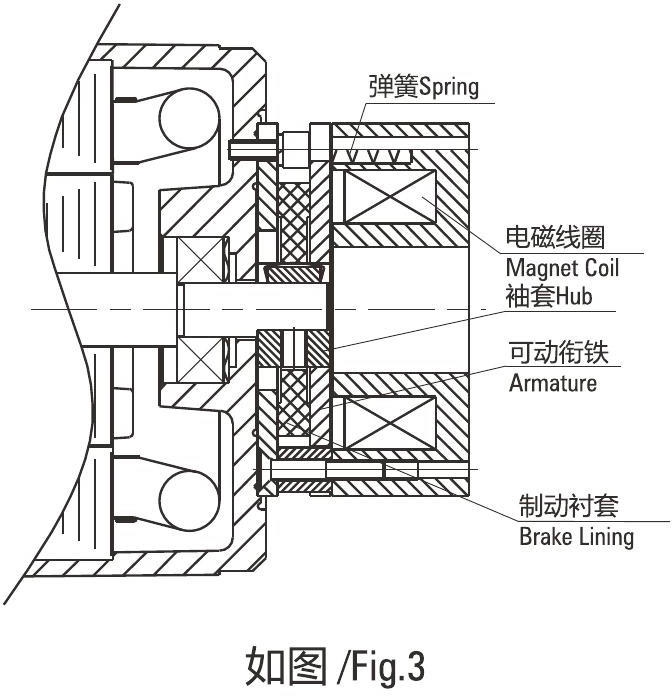
1、 โครงสร้างและหลักการทำงาน
ตารางที่ 3 คือโครงสร้างของมอเตอร์เบรกแม่เหล็กไฟฟ้า เราผลิต Power Off Activated Type การใช้แรงดันไฟฟ้าบนขดลวดมันจะดึงดูดกระดองที่กดด้วยสปริง มอเตอร์จะอยู่ในช่วงของการหมุนเมื่อมีฟันเฟืองระหว่างกระดองและขอบเบรค เมื่อแรงดันไฟฟ้าที่คดเคี้ยวถูกตัดลงภายใต้อิทธิพลของสปริงกระดองจะกดขอบเบรกซึ่งจะทำให้เกิดแรงเบรก จากนั้นมอเตอร์จะหยุด
2、 ลักษณะของเบรกแม่เหล็กไฟฟ้า
เป็นเบรกแม่เหล็กไฟฟ้า AC Power Off Activated Type ซึ่งเชื่อมต่อโดยตรงกับมอเตอร์ มันจะหยุดกะพริบและโหลดต่อเมื่อแหล่งจ่ายไฟดับ จะคงแรงบิดระหว่าง 0.05-2.0 N.m. เหมาะอย่างยิ่งสำหรับเบรกนิรภัยในกรณีที่ปิดเครื่องโดยไม่รู้ตัว แม่เหล็กไฟฟ้าสามารถเปลี่ยนทิศทางได้บ่อย สามารถหยุดได้ 6 ครั้งในหนึ่งนาที แต่ต้องแน่ใจว่านาน 3 วินาทีขึ้นไป
หลังจากที่เราตั้งค่าลูปสับเปลี่ยนในเบรคแล้วก็จะสามารถใช้แหล่งจ่ายไฟร่วมกับมอเตอร์ได้
※ค่าเป็นมาตรฐาน จะมีการเปลี่ยนแปลงในสภาพที่แตกต่างกัน เมื่อใช้งานจริงตรวจสอบให้แน่ใจว่าอุณหภูมิพื้นผิวของมอเตอร์น้อยกว่า 90 ° C
3、 คุณสมบัติสำหรับเวลาเริ่มต้นและเวลาเบรก
เวลาสตาร์ทหมายถึงเวลาสำหรับเวลาสตาร์ทของมอเตอร์บวกกับเวลาปลดเบรกแม่เหล็กไฟฟ้า เวลาเบรคหมายถึงเวลาตั้งแต่ตัดไฟจนถึงเวลามอเตอร์หยุดสนิท เวลาวิ่งเกินเวลาสตาร์ทและเวลาเบรคจะแตกต่างกันไปตามการใช้งานที่แตกต่างกัน
■ตารางที่ 2. เบรกแม่เหล็กไฟฟ้า (ประเภทที่เปิดใช้งานการปิดเครื่อง)
| เฟส | ขนาดเอาท์พุท | แรงดันไฟฟ้า V. | ความถี่ Hz | ปัจจุบันก | อินพุต W | รักษาแรงบิด | ทำงานมากเกินไป | ||
| MM | W | เอ็น. ซม | Kgf.cm | รอบ | |||||
| 1 เฟส | 70 | 15 | 110 120 220 230 | 50/60 | 0.091 | 8.2 | 0.5 | 50 | 3.5 |
| 80 | 25 | ||||||||
| 90 | 40 | ||||||||
| 60 | |||||||||
| 0.111 | 10.0 | 1.0 | 100 | ||||||
| 90 | |||||||||
| 120 | |||||||||
| 100 | 120 | ||||||||
| 140 | |||||||||
| 200 | 0.144 | 13.0 | 2.0 | 200 | |||||
| 3 เฟส | 60 | 6 | 220 ~ 230 | 50/60 | 0.073 | 6.6 | 0.25 | 25 | |
| 70 | 15 | 380 ~ 415 | 0.037 | 6.6 | 0.25 | 25 | |||
| 80 | 25 | 200 ~ 230 380 ~ 415 | 0.091 | 8.2 | 0.5 | 50 | |||
| 90 | 40 | ||||||||
| 60 | 0.046 | 8.2 | 0.5 | 50 | |||||
| 90 | 200 ~ 230 380 ~ 415 | 0.111 | 10.0 | 1.0 | 100 | ||||
| 120 | |||||||||
| 100 | 120 | 0.056 | 10.0 | 1.0 | 100 | ||||
| 140 | |||||||||
| 200 | 200 ~ 230 380 ~ 415 | 0.144 | 13.0 | 2.0 | 200 | ||||
| 0.144 | 13.0 | 2.0 | 200 | ||||||
■คุณสมบัติของมอเตอร์ควบคุมความเร็ว
1、 เป็นหน่วยของคอนโทรลเลอร์และมอเตอร์ จำเป็นต้องเชื่อมต่อเพียงครั้งเดียว โพเทนชิออมิเตอร์สามารถปรับความเร็วได้อย่างง่ายดาย ตัวควบคุมได้รับการแก้ไขด้วยลูปควบคุมความเร็วตัวเก็บประจุการบังคับใช้ความเร็วและอื่น ๆ ไม่มีฟังก์ชั่นของการหยุดทันทีในหน่วย
2、 คอนโทรลเลอร์สามารถสร้างตัวแปรความเร็วระหว่าง 90-1350rpm ที่ 50 Hz และ 90-1650rpm ที่ 60Hz
3 โปรดอย่าใช้มอเตอร์ด้วยความเร็วต่ำเป็นเวลานานเพื่อหลีกเลี่ยงความร้อนสูงเกินไป











