ไทย
ไทย

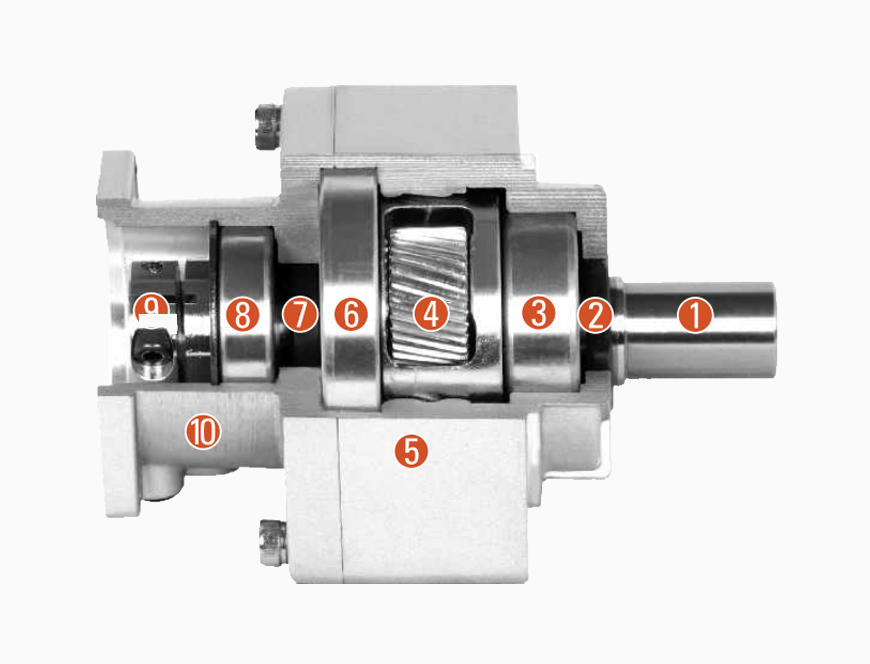

 หมายเหตุ 1) ทั้งหมดที่สอดคล้องกับเฟืองเกลียว
หมายเหตุ 1) ทั้งหมดที่สอดคล้องกับเฟืองเกลียว 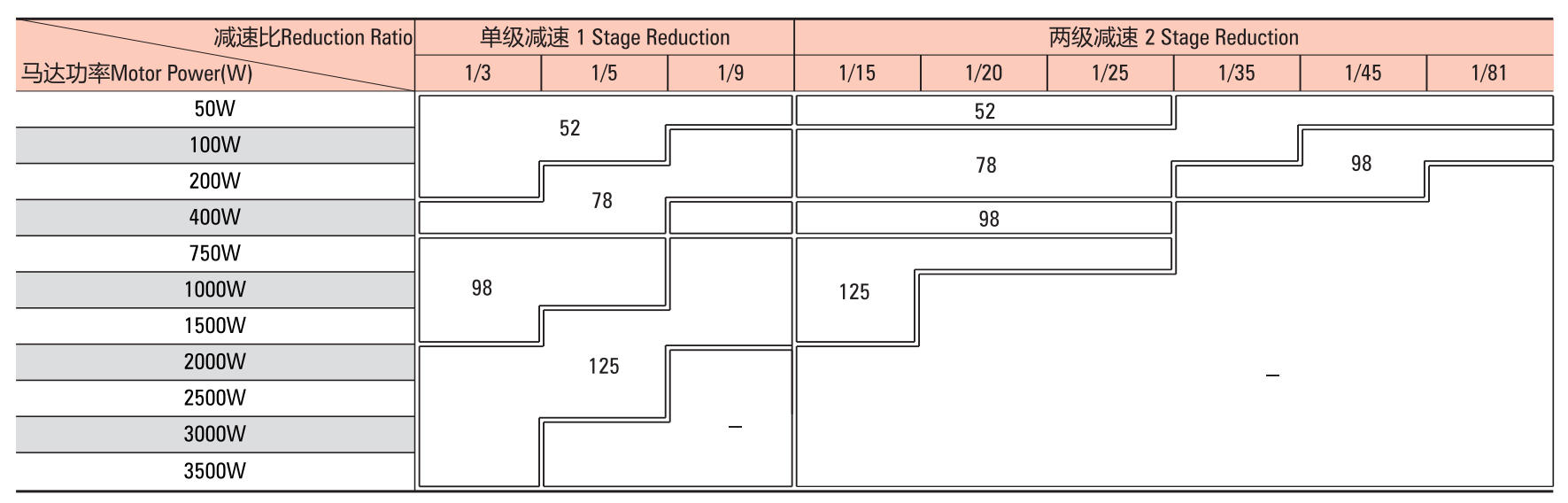 หมายเหตุ 1) ทั้งหมดที่สอดคล้องกับเฟืองเกลียว
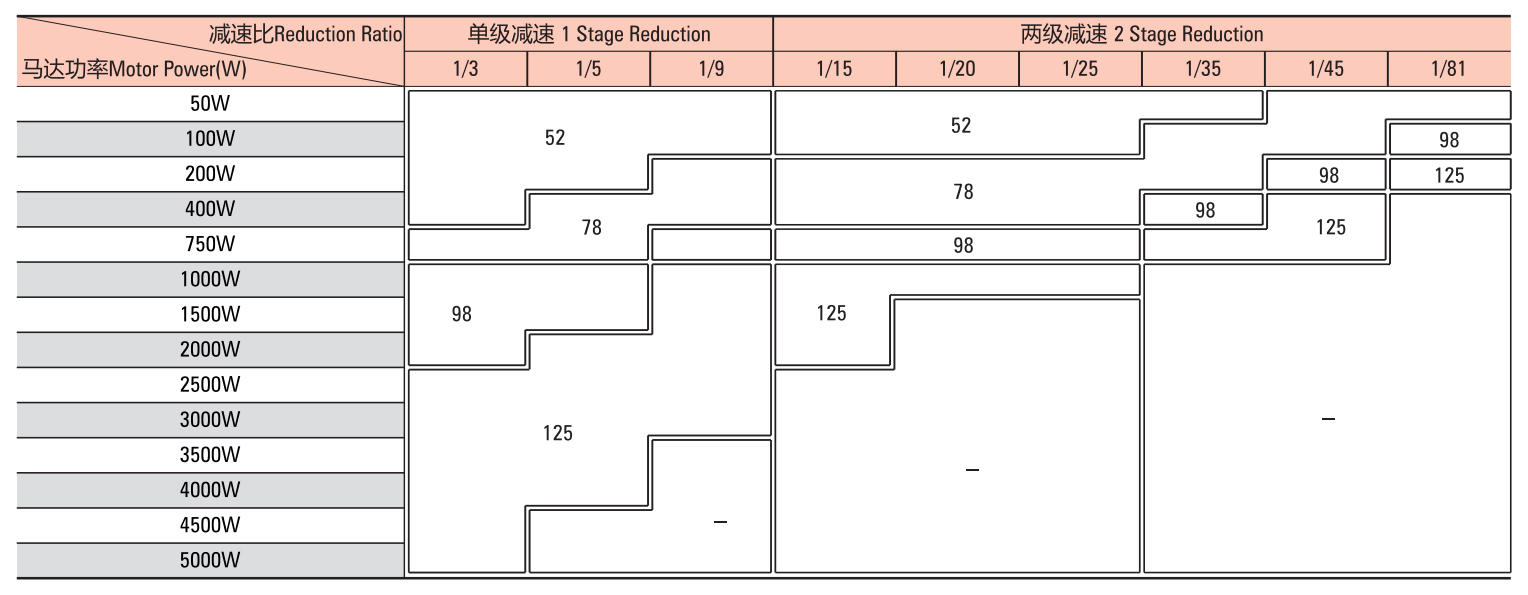
หมายเหตุ 1) ทั้งหมดที่สอดคล้องกับเฟืองเกลียว ※แรงบิดถูก จำกัด ไว้ที่ประเภทต่อไปนี้:
ลด 52: 1/5 (100W) ลด 78: 1/81 (50W)
98: ลด 1/3 (1500W), ลด 1/45 (200W)
ลด 1/81 (100W)
125: ลด 1/3 (3500W), ลด 1/25 (250W)
ลด 52: 1/5 (100W) ลด 78: 1/81 (50W)
98: ลด 1/3 (1500W), ลด 1/45 (200W)
ลด 1/81 (100W)
125: ลด 1/3 (3500W), ลด 1/25 (250W)