ไทย
ไทย


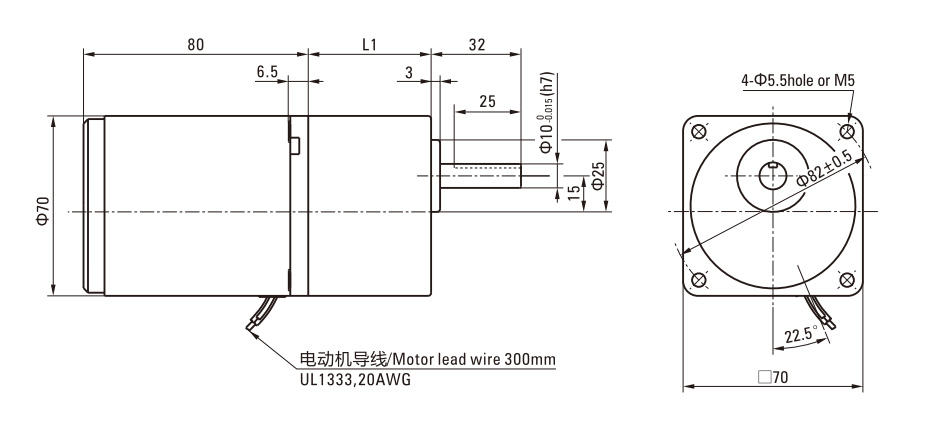
●มอเตอร์
| ประเภท | รุ่น | |
| เพลาปีกนก | เพลากลม | |
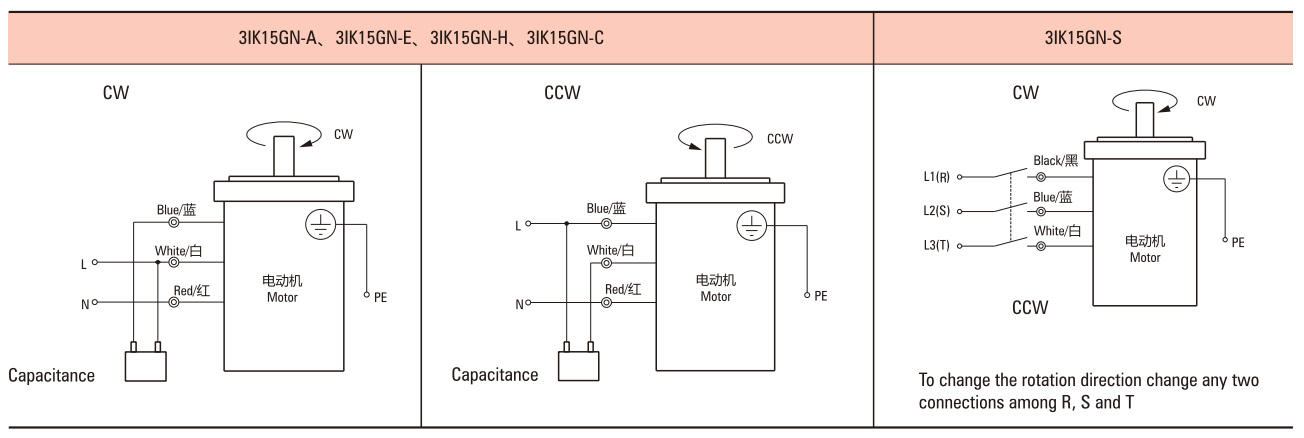
| ตะกั่ว | 3IK15GN-A | 3IK15A-A |
| 3IK1SGN-E | 3IK15A-E | |
| 3IK15GN-C | 3IK15A-C | |
| 3IK15GN-H | 3IK15A-H | |
| 3IK15GN-S | 3IK15A-S | |
|
| 3IK15GN-S3 | 3IK15A-S3 |
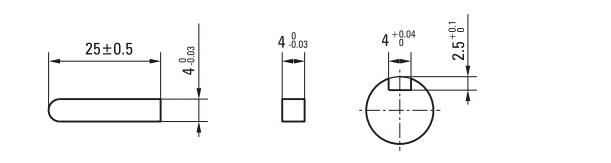
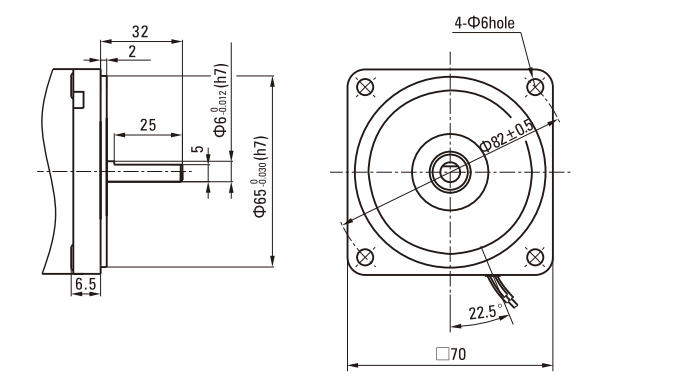
●หัวเกียร์เพลาคู่ขนาน (แยกจำหน่าย)
| ประเภท Geartiead | รุ่นหัวเกียร์ | อัตราทดเกียร์ |
| อายุการใช้งานยาวนาน•เสียงรบกวนต่ำ | 3GN □ K. | 3,3.6,5,6,7,5,9, 12.5,15,18, 25,30, 36, 50, 60, 75, 90, 100, 120, 150, 180, 200 |
| 3GN10XK (หัวเกียร์แบบทศนิยม) | ||
●ป้อนอัตราทดเกียร์ในช่อง (□) ภายในชื่อรุ่น